generate_pedestrian_path
Path_GUI_Application_Models: Plugin models/Pedestrian Skill/models/Generate pedestrian paths.gaml
/***
* Name: generate_pedestrian_path
* Author: Patrick Taillandier
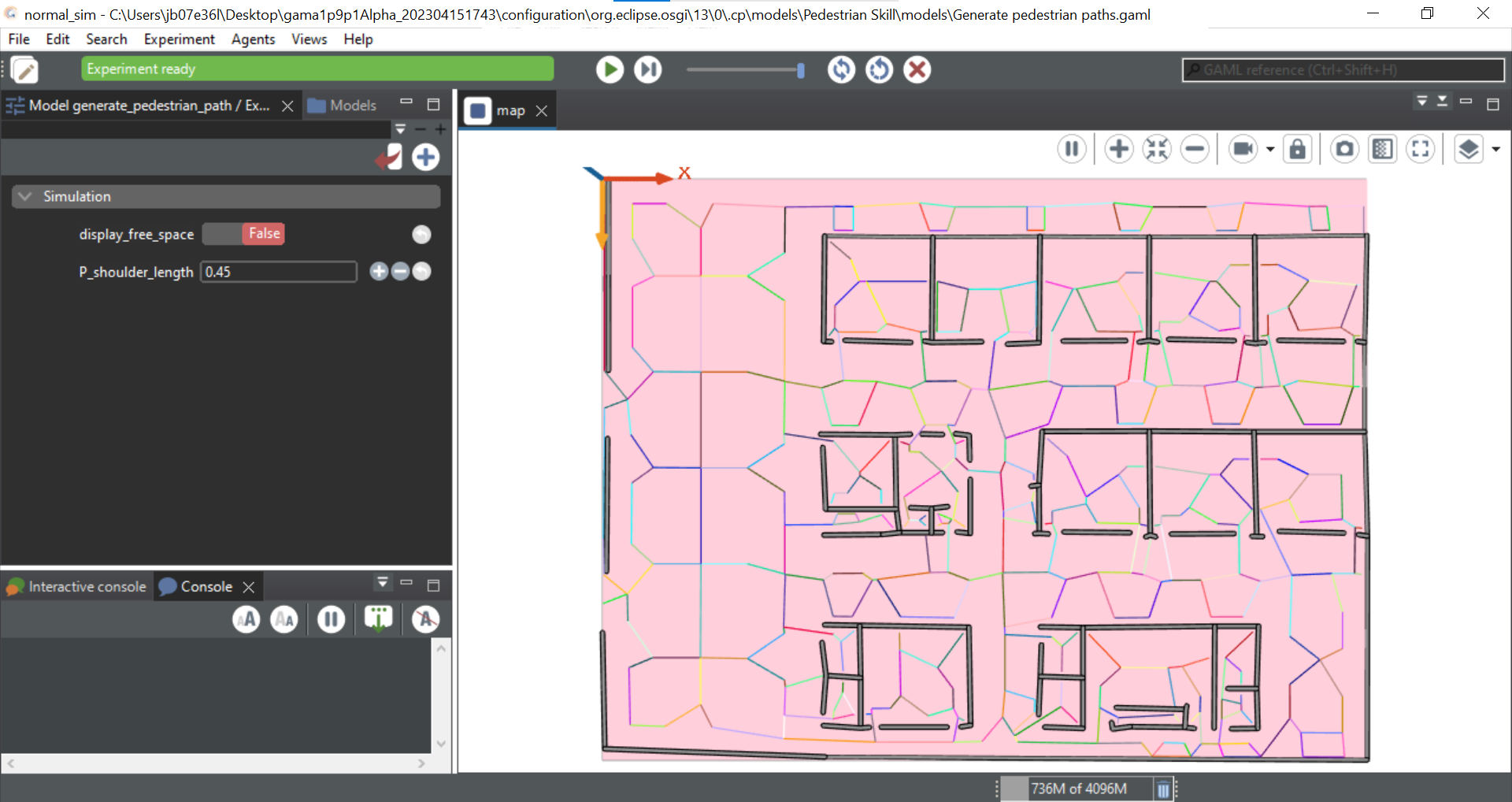
* Description: Show how to create pedestrian path and associated free space
* Tags: * Tags: pedestrian, gis, shapefile, graph, agent_movement, skill, transport
***/
model generate_pedestrian_path
global {
file wall_shapefile <- file("../includes/walls.shp");
geometry shape <- envelope(wall_shapefile);
bool display_free_space <- false parameter: true;
float P_shoulder_length <- 0.45 parameter: true;
float simplification_dist <- 0.5; //simplification distance for the final geometries
bool add_points_open_area <- true;//add points to open areas
bool random_densification <- false;//random densification (if true, use random points to fill open areas; if false, use uniform points),
float min_dist_open_area <- 0.1;//min distance to considered an area as open area,
float density_open_area <- 0.01; //density of points in the open areas (float)
bool clean_network <- true;
float tol_cliping <- 1.0; //tolerance for the cliping in triangulation (float; distance),
float tol_triangulation <- 0.1; //tolerance for the triangulation
float min_dist_obstacles_filtering <- 0.0;// minimal distance to obstacles to keep a path (float; if 0.0, no filtering),
geometry open_area ;
init {
open_area <- copy(shape);
create wall from:wall_shapefile {
open_area <- open_area -(shape buffer (P_shoulder_length/2.0));
}
list generated_lines <- generate_pedestrian_network([],[open_area],add_points_open_area,random_densification,min_dist_open_area,density_open_area,clean_network,tol_cliping,tol_triangulation,min_dist_obstacles_filtering,simplification_dist);
create pedestrian_path from: generated_lines {
do initialize bounds:[open_area] distance: min(10.0,(wall closest_to self) distance_to self) masked_by: [wall] distance_extremity: 1.0;
}
save pedestrian_path type: shp to: "../includes/pedestrian paths.shp";
save open_area type: shp to: "../includes/open area.shp";
save pedestrian_path collect each.free_space type: shp to: "../includes/free spaces.shp";
}
}
species pedestrian_path skills: [pedestrian_road]{
rgb color <- rnd_color(255);
aspect default {
draw shape color: color;
}
aspect free_area_aspect {
if(display_free_space and free_space != nil) {
draw free_space color: #cyan border: #black;
}
}
}
species wall {
aspect default {
draw shape + (P_shoulder_length/2.0) color: #gray border: #black;
}
}
experiment normal_sim type: gui {
output {
display map type: opengl{
species wall refresh: false;
graphics "open_area" {
draw open_area color: #lightpink;
}
species pedestrian_path aspect:free_area_aspect transparency: 0.5 ;
species pedestrian_path refresh: false;
}
}
}
