pedestrian_complex_environment
Path_GUI_Application_Models: Plugin models/Pedestrian Skill/models/Complex environment - walk.gaml
/***
* Name: pedestrian_complex_environment
* Author: Patrick Taillandier
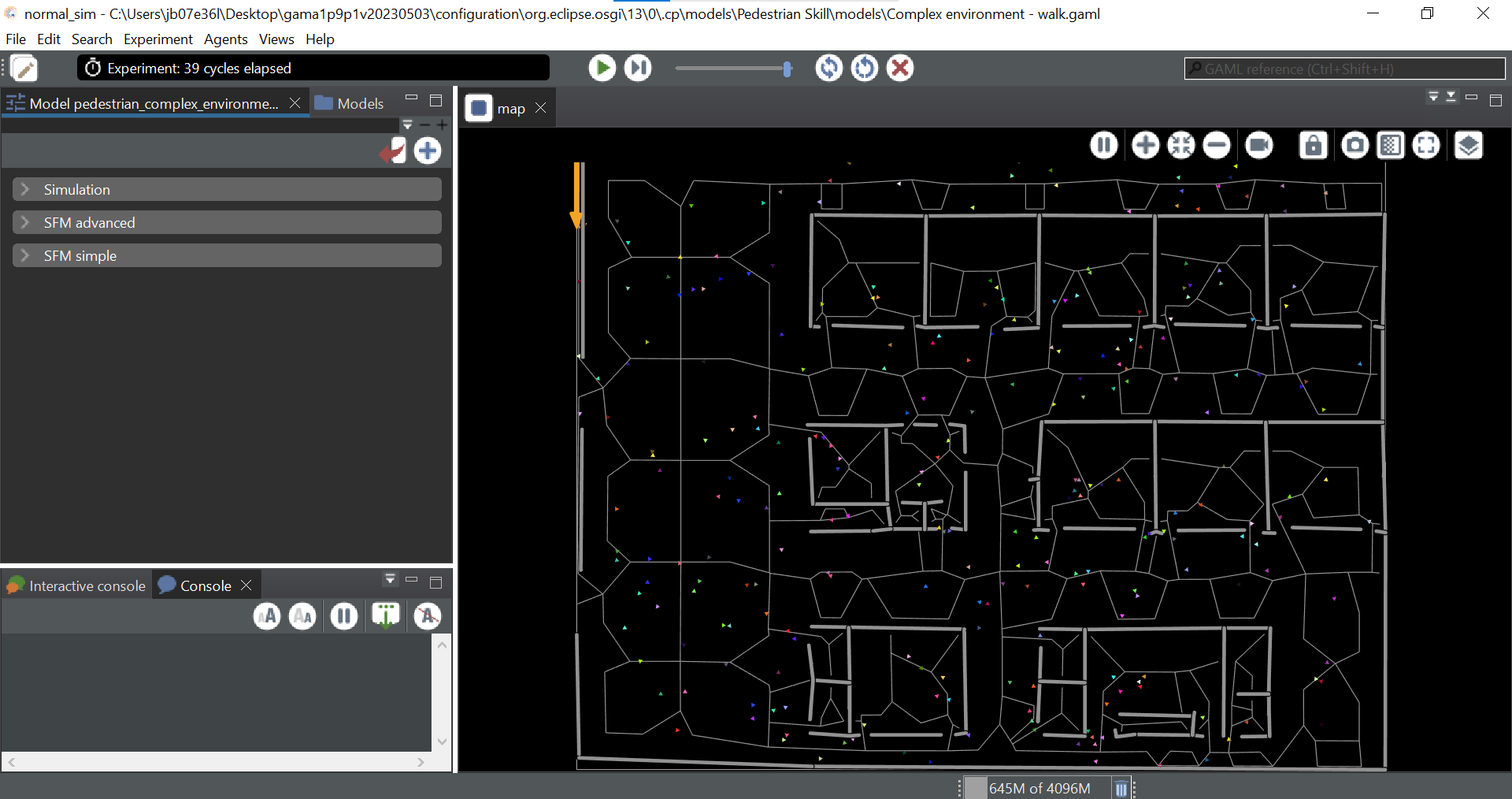
* Description: show how to use the pedestrian skill for complex envorinment - require to generate pedestrian paths before - see model "Generate Pedestrian path.gaml"
* Tags: pedestrian, gis, shapefile, graph, agent_movement, skill, transport
***/
model pedestrian_complex_environment
global {
file wall_shapefile <- file("../includes/walls.shp");
shape_file free_spaces_shape_file <- shape_file("../includes/free spaces.shp");
shape_file open_area_shape_file <- shape_file("../includes/open area.shp");
shape_file pedestrian_paths_shape_file <- shape_file("../includes/pedestrian paths.shp");
graph network;
geometry shape <- envelope(wall_shapefile);
bool display_free_space <- false parameter: true;
bool display_force <- false parameter: true;
bool display_target <- false parameter: true;
bool display_circle_min_dist <- true parameter: true;
float P_shoulder_length <- 0.45 parameter: true;
float P_proba_detour <- 0.5 parameter: true ;
bool P_avoid_other <- true parameter: true ;
float P_obstacle_consideration_distance <- 3.0 parameter: true ;
float P_pedestrian_consideration_distance <- 3.0 parameter: true ;
float P_tolerance_target <- 0.1 parameter: true;
bool P_use_geometry_target <- true parameter: true;
string P_model_type <- "simple" among: ["simple", "advanced"] parameter: true ;
float P_A_pedestrian_SFM_advanced parameter: true <- 0.16 category: "SFM advanced" ;
float P_A_obstacles_SFM_advanced parameter: true <- 1.9 category: "SFM advanced" ;
float P_B_pedestrian_SFM_advanced parameter: true <- 0.1 category: "SFM advanced" ;
float P_B_obstacles_SFM_advanced parameter: true <- 1.0 category: "SFM advanced" ;
float P_relaxion_SFM_advanced parameter: true <- 0.5 category: "SFM advanced" ;
float P_gama_SFM_advanced parameter: true <- 0.35 category: "SFM advanced" ;
float P_lambda_SFM_advanced <- 0.1 parameter: true category: "SFM advanced" ;
float P_minimal_distance_advanced <- 0.25 parameter: true category: "SFM advanced" ;
float P_n_prime_SFM_simple parameter: true <- 3.0 category: "SFM simple" ;
float P_n_SFM_simple parameter: true <- 2.0 category: "SFM simple" ;
float P_lambda_SFM_simple <- 2.0 parameter: true category: "SFM simple" ;
float P_gama_SFM_simple parameter: true <- 0.35 category: "SFM simple" ;
float P_relaxion_SFM_simple parameter: true <- 0.54 category: "SFM simple" ;
float P_A_pedestrian_SFM_simple parameter: true <-4.5category: "SFM simple" ;
float step <- 0.1;
int nb_people <- 250;
geometry open_area ;
init {
open_area <- first(open_area_shape_file.contents);
create wall from:wall_shapefile;
create pedestrian_path from: pedestrian_paths_shape_file {
list fs <- free_spaces_shape_file overlapping self;
free_space <- fs first_with (each covers shape);
}
network <- as_edge_graph(pedestrian_path);
ask pedestrian_path {
do build_intersection_areas pedestrian_graph: network;
}
create people number:nb_people{
location <- any_location_in(one_of(open_area));
obstacle_consideration_distance <-P_obstacle_consideration_distance;
pedestrian_consideration_distance <-P_pedestrian_consideration_distance;
shoulder_length <- P_shoulder_length;
avoid_other <- P_avoid_other;
proba_detour <- P_proba_detour;
use_geometry_waypoint <- P_use_geometry_target;
tolerance_waypoint<- P_tolerance_target;
pedestrian_species <- [people];
obstacle_species<-[wall];
pedestrian_model <- P_model_type;
if (pedestrian_model = "simple") {
A_pedestrians_SFM <- P_A_pedestrian_SFM_simple;
relaxion_SFM <- P_relaxion_SFM_simple;
gama_SFM <- P_gama_SFM_simple;
lambda_SFM <- P_lambda_SFM_simple;
n_prime_SFM <- P_n_prime_SFM_simple;
n_SFM <- P_n_SFM_simple;
} else {
A_pedestrians_SFM <- P_A_pedestrian_SFM_advanced;
A_obstacles_SFM <- P_A_obstacles_SFM_advanced;
B_pedestrians_SFM <- P_B_pedestrian_SFM_advanced;
B_obstacles_SFM <- P_B_obstacles_SFM_advanced;
relaxion_SFM <- P_relaxion_SFM_advanced;
gama_SFM <- P_gama_SFM_advanced;
lambda_SFM <- P_lambda_SFM_advanced;
minimal_distance <- P_minimal_distance_advanced;
}
}
}
reflex stop when: empty(people) {
do pause;
}
}
species pedestrian_path skills: [pedestrian_road]{
aspect default {
draw shape color: #gray;
}
aspect free_area_aspect {
if(display_free_space and free_space != nil) {
draw free_space color: #lightpink border: #black;
}
}
}
species wall {
geometry free_space;
float high <- rnd(10.0, 20.0);
aspect demo {
draw shape border: #black depth: high texture: ["../includes/top.png","../includes/texture5.jpg"];
}
aspect default {
draw shape + (P_shoulder_length/2.0) color: #gray border: #black;
}
}
species people skills: [pedestrian]{
rgb color <- rnd_color(255);
float speed <- gauss(5,1.5) #km/#h min: 2 #km/#h;
reflex move {
if (final_waypoint = nil) {
do compute_virtual_path pedestrian_graph:network target: any_location_in(open_area) ;
}
do walk ;
}
aspect default {
if display_circle_min_dist and minimal_distance > 0 {
draw circle(minimal_distance).contour color: color;
}
draw triangle(shoulder_length) color: color rotate: heading + 90.0;
if display_target and current_waypoint != nil {
draw line([location,current_waypoint]) color: color;
}
if display_force {
loop op over: forces.keys {
if (species(agent(op)) = wall ) {
draw line([location, location + point(forces[op])]) color: #red end_arrow: 0.1;
}
else if ((agent(op)) = self ) {
draw line([location, location + point(forces[op])]) color: #blue end_arrow: 0.1;
}
else {
draw line([location, location + point(forces[op])]) color: #green end_arrow: 0.1;
}
}
}
}
}
experiment normal_sim type: gui {
float minimum_cycle_duration <- 0.02;
output {
display map type: opengl{
species wall refresh: false;
species pedestrian_path aspect:free_area_aspect transparency: 0.5 ;
species pedestrian_path refresh: false;
species people;
}
}
}
